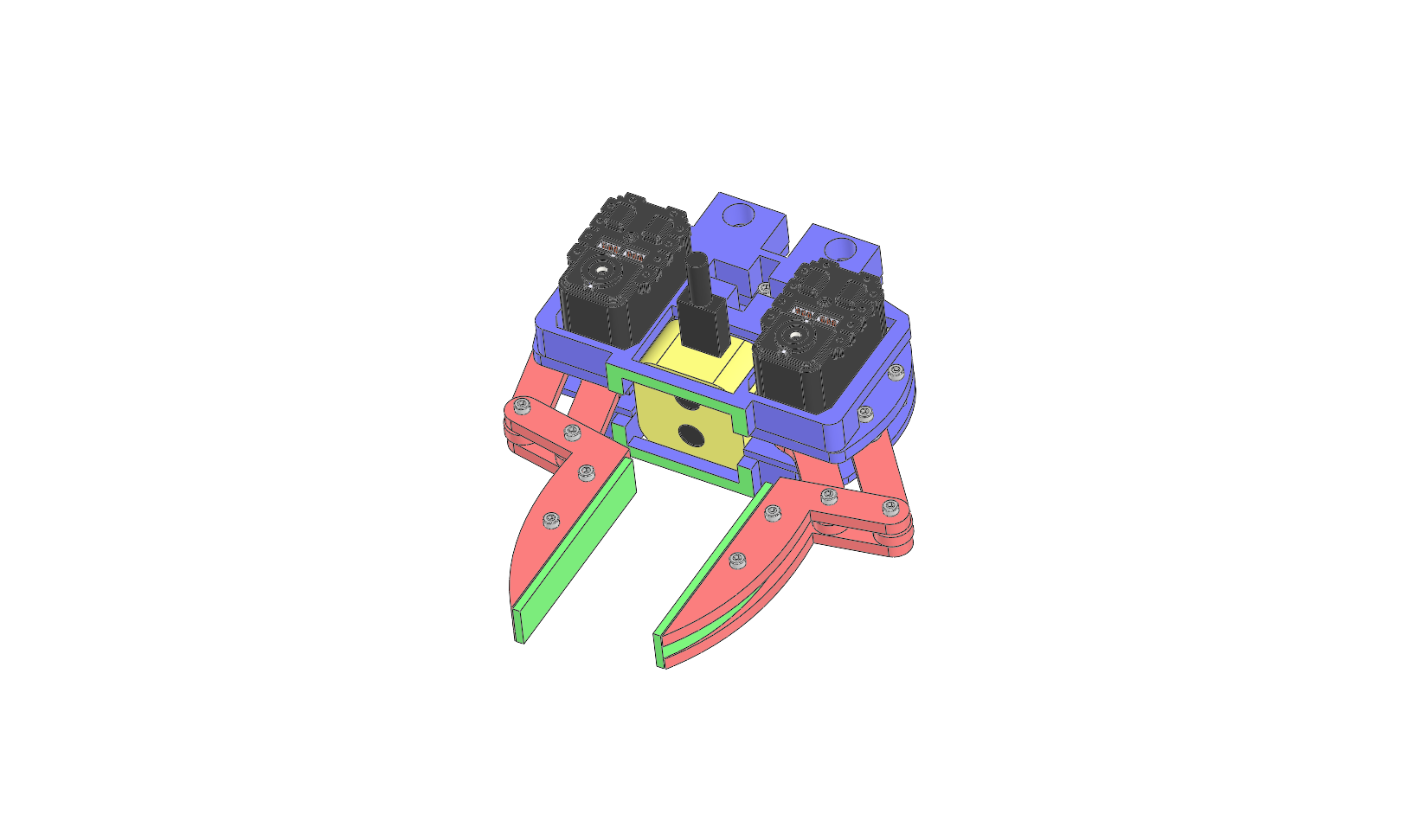
Thesis - Designing a Robust and Manufacturable Robot Gripper
Designing and using a 4 bar robot gripper using a genetic algorithm and modeling the dynamic system in Matlab.
Created Github repository for easy control of the gripper in Python with force, position, and speed control.
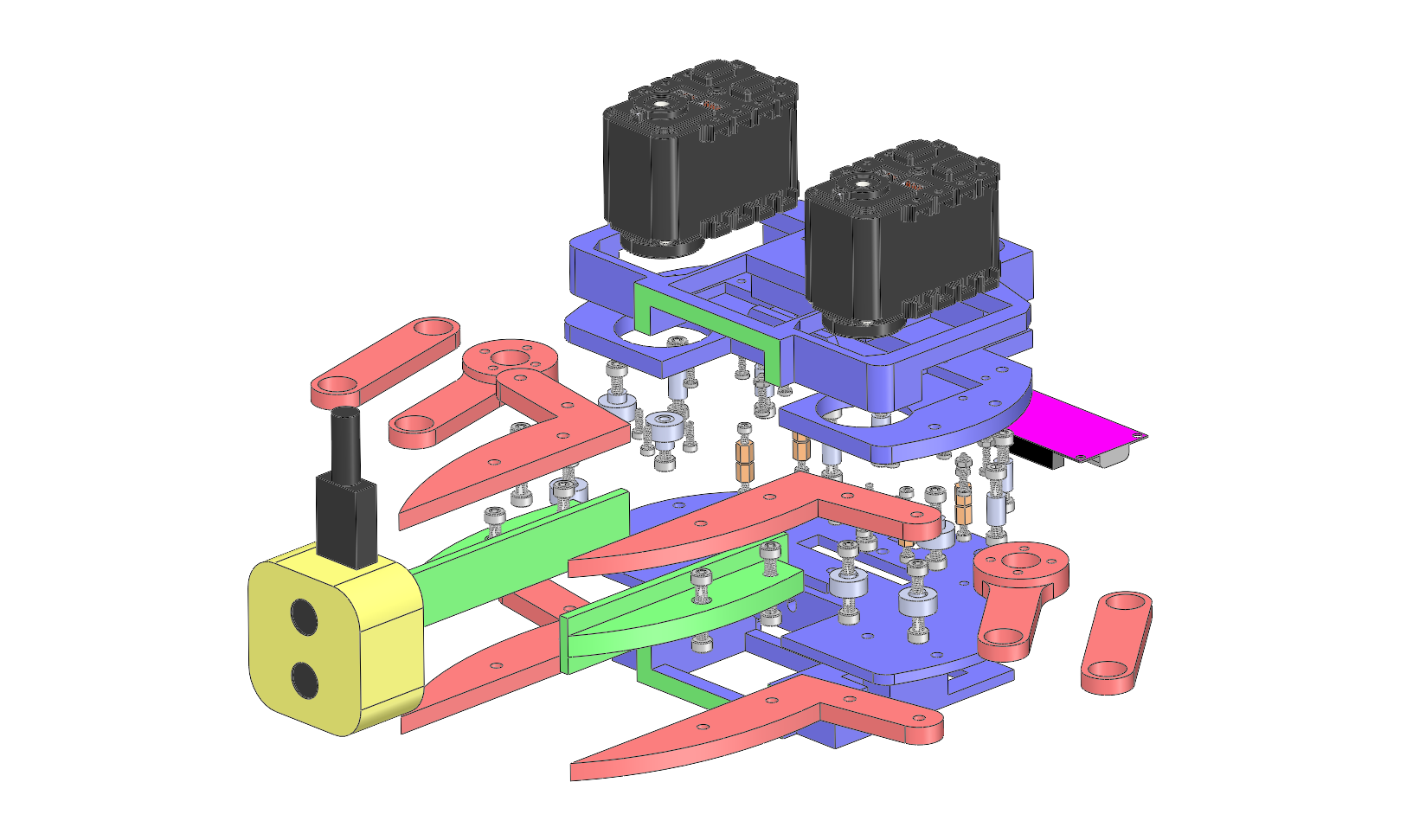
Gear Assembly
Exploded View
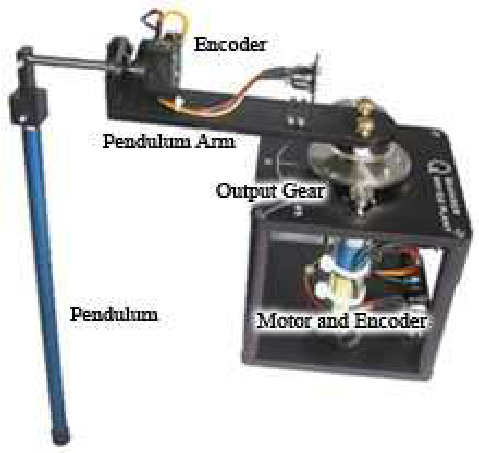
System Identification and Controllers
System identified inverted pendulum, rotary bar, simple pendulum, flex link, and gyro in the frequency domain.
Designed a controller for each using root locus, PID control, or LQR control on hardware
Inverted Pendulum
Flex Link
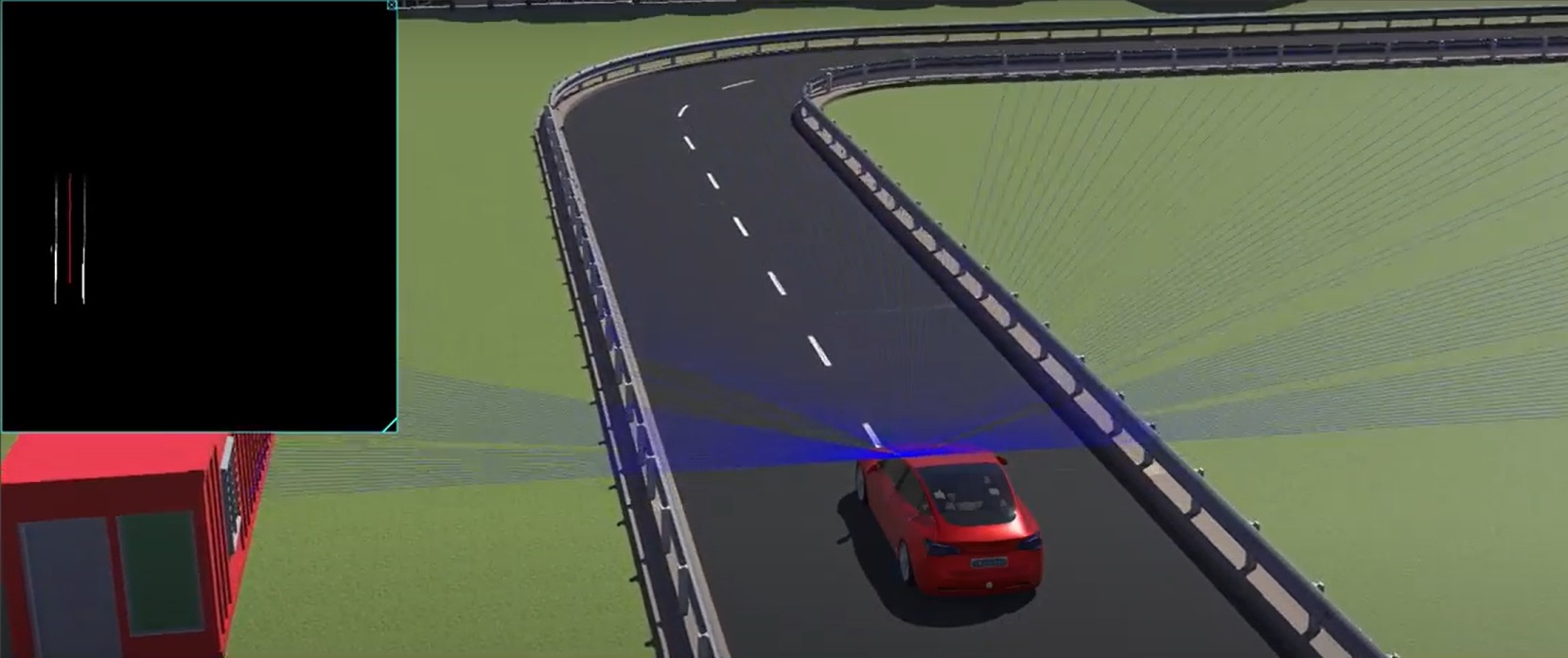
Autonomous Vehicle Competition
Raced a Tesla Car using Webots Simulator. Took sensor measurements with a LiDAR, camera, and an IMU.
Implemented EKF SLAM and capable of parallel parking. Created a PID controller for the steering and the speed of the car.
Paper
Slam
Parking
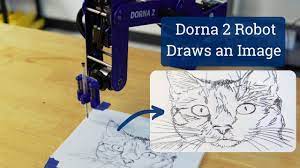
Dorna Robotics Internship
Transformed a 2D path in SVG format to a 3D path. Created a Youtube video for the company showcasing the code. Also 3D modeled and rapid prototyped attachments and housings.
Blog Post
Youtube Video
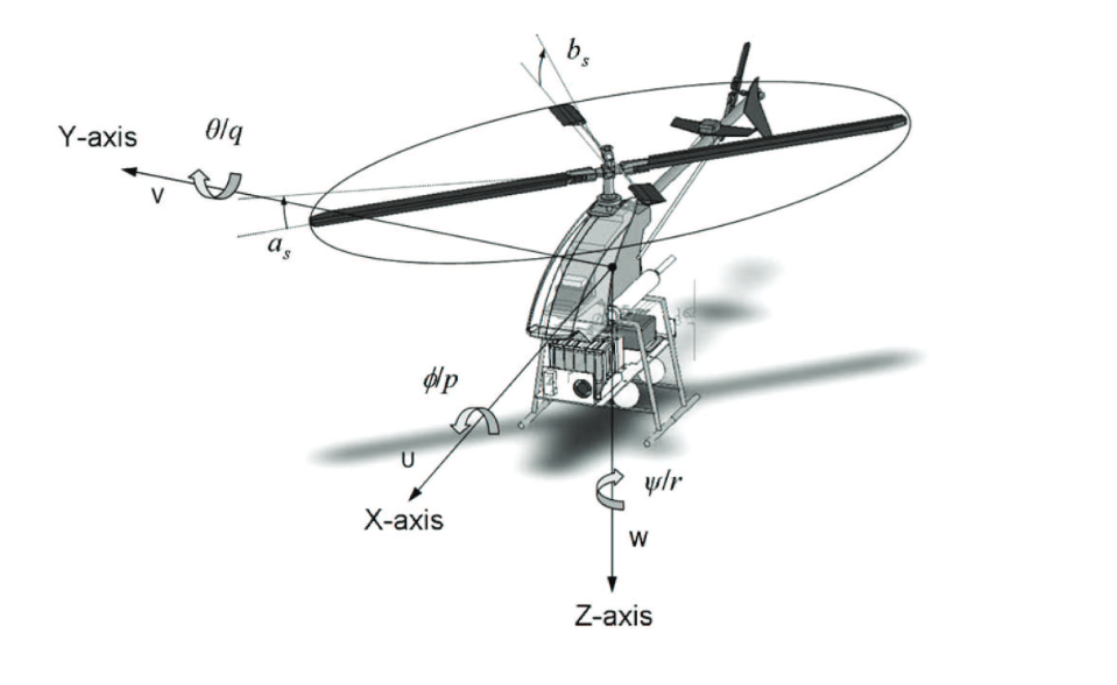
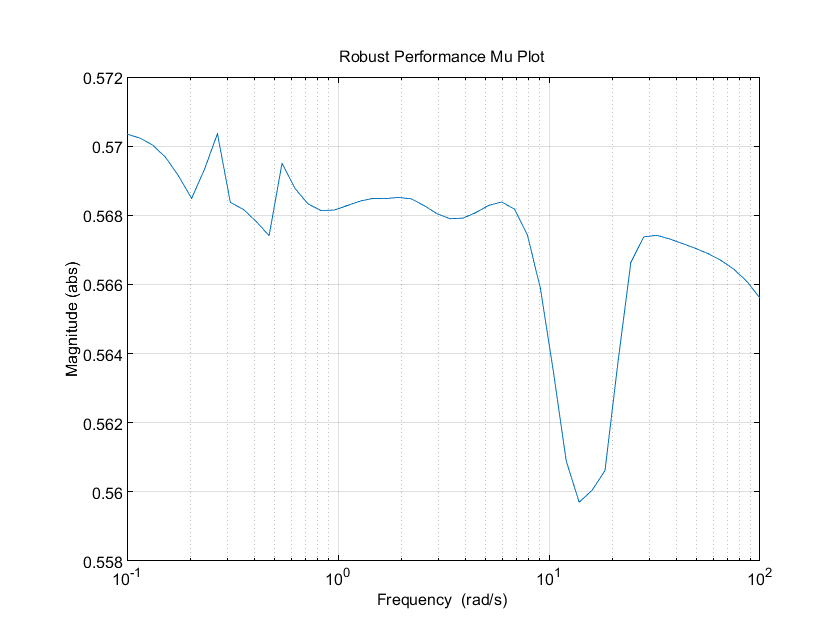
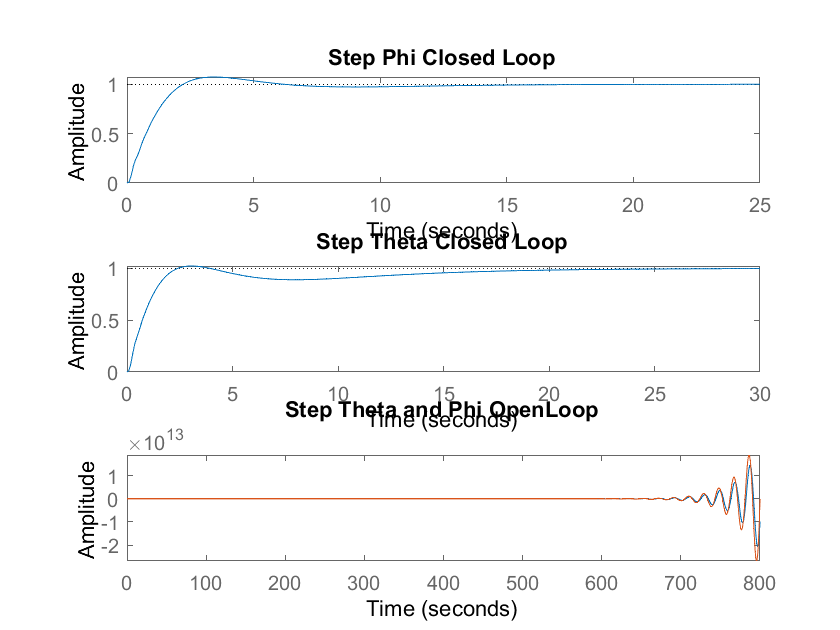
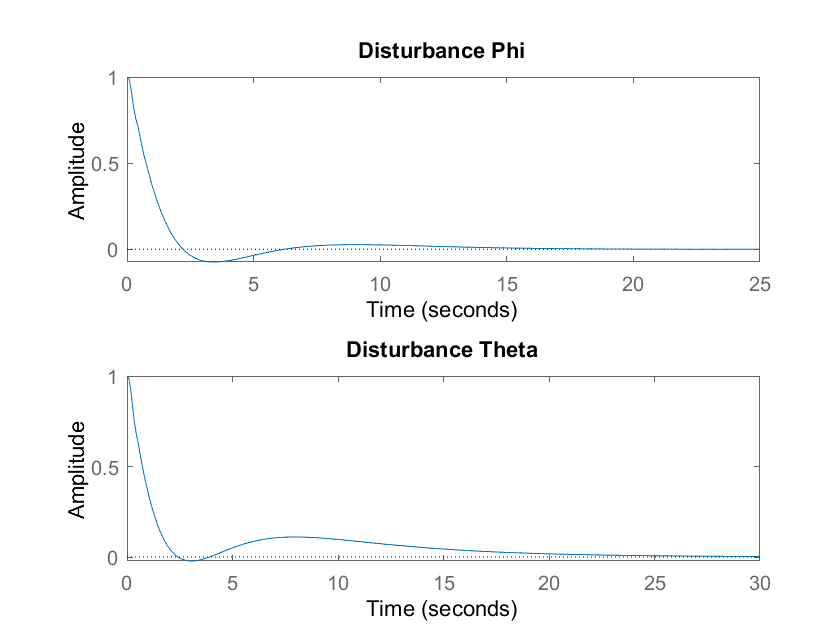
Robust Control of 6 DOF Helicopter
Formulated a generalized plant of a rotary wing micro air vehicle for weighting functions for performance and input
Synthesized an H∞ controller with bandwidth, tracking error, and disturbance rejection capabilities
Analyzed nominal performance, robust performance, and robust stability with uncertainty
Mu
Step
Disturbance
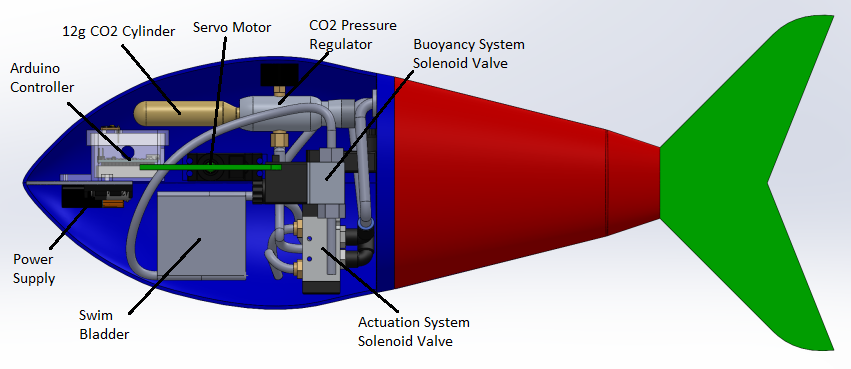
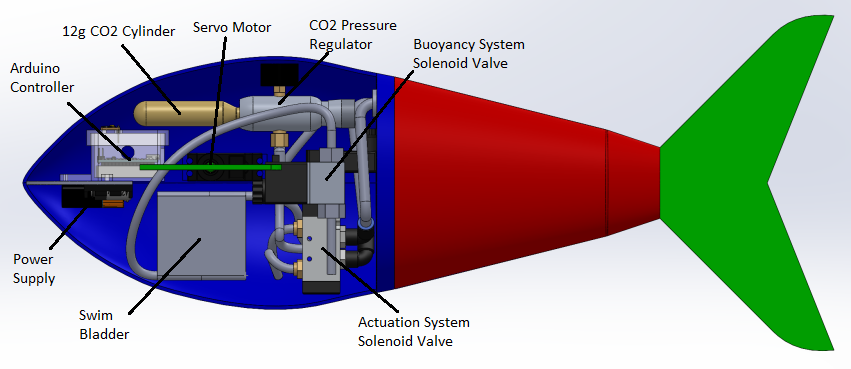
Soft Robotic Fish(Senior Project)
Designed a robotic fish capable of actuating using bio inspired fiber-reinforced actuation using C02
and a solenoid valve pressurized system. Designed ballast tank like system in order to change depth of fish.
3D modeled system using Solidworks and controlled using Arduino.
Paper
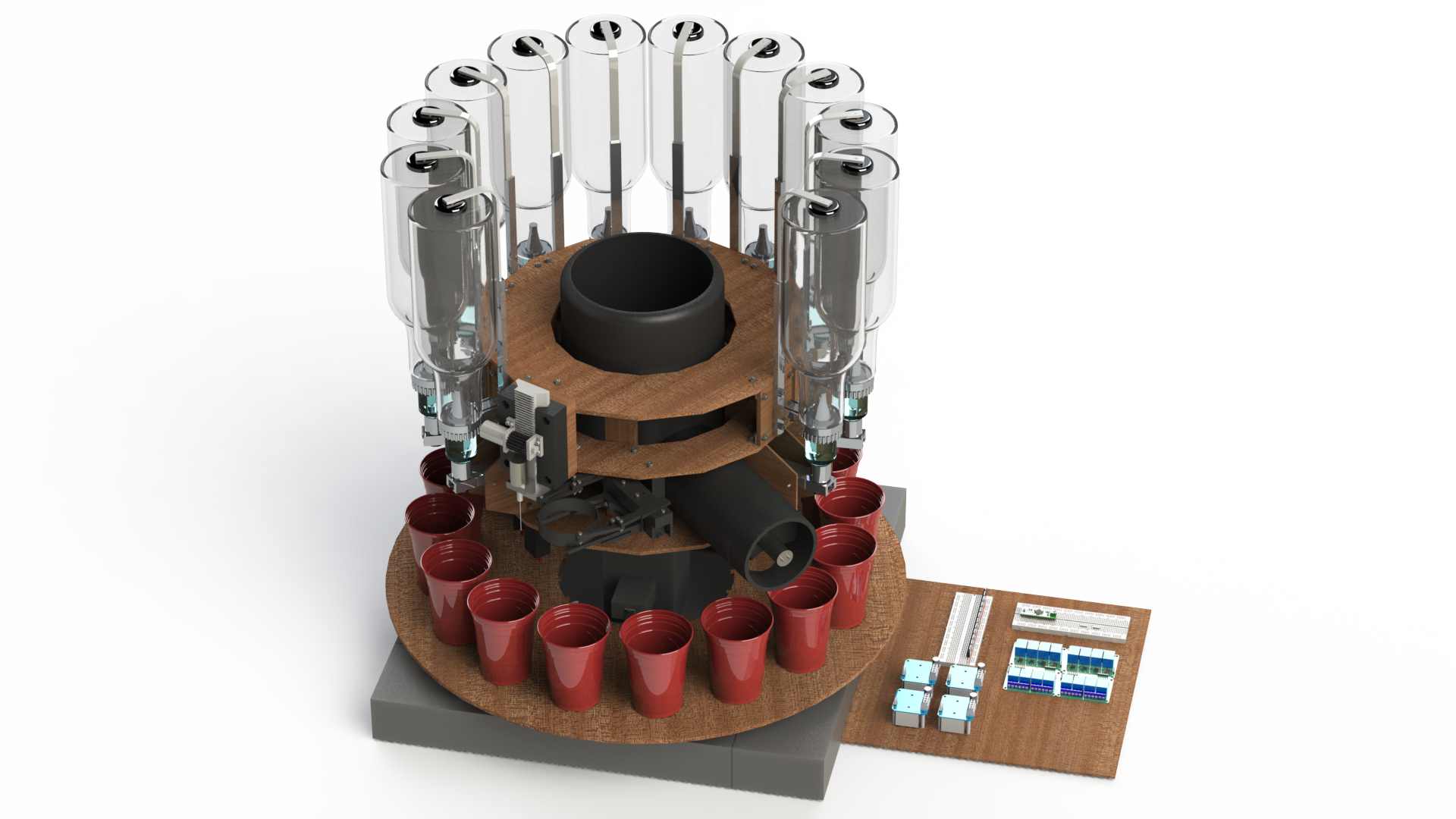
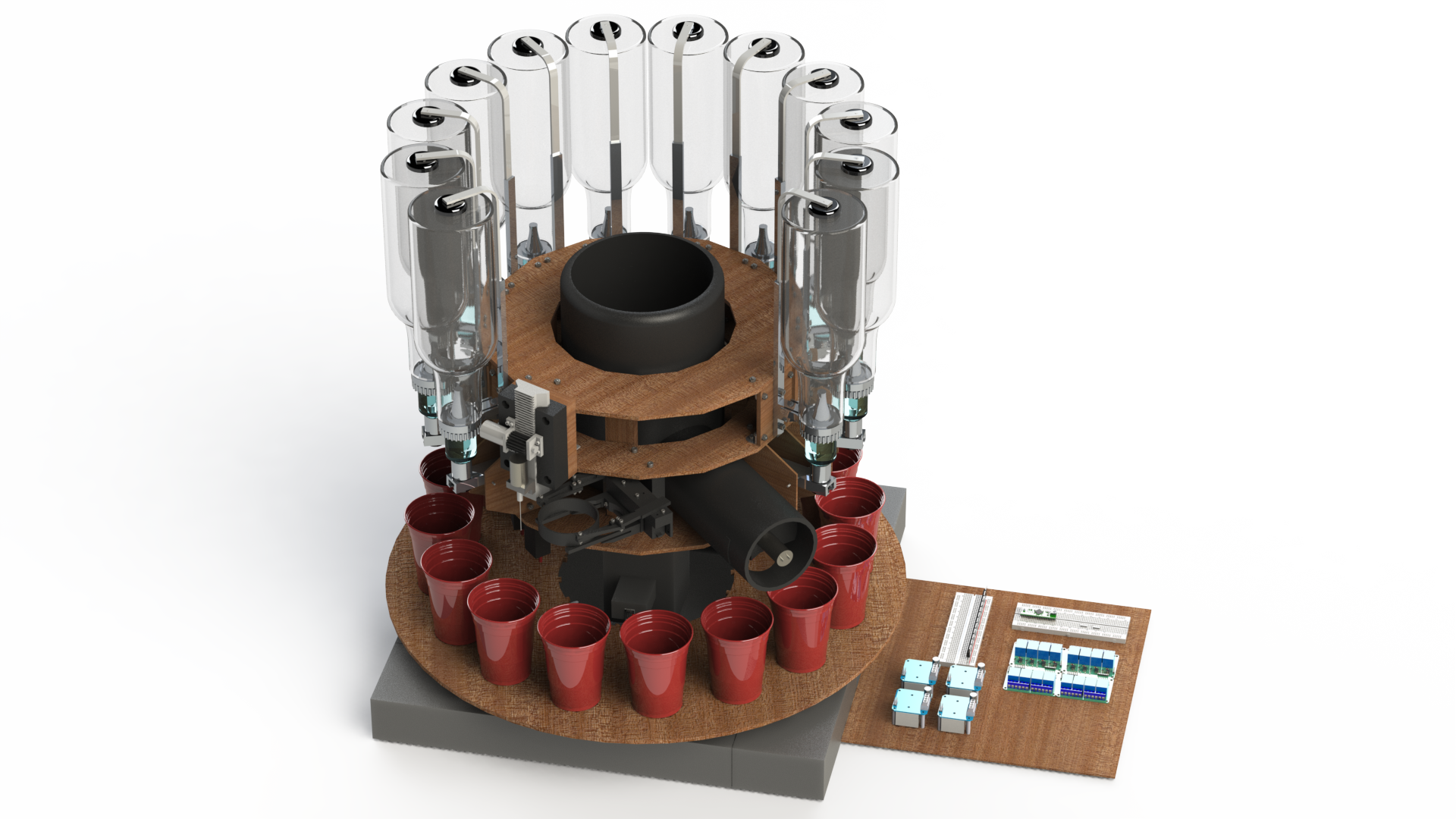
Robot Bartender
The robot is capable of serving 16 people at once with over 30 different common drinks
and will dispense a cup with ice and fill with your preferred mixed drink using audio to command the robot.
Controlled 12 actuators, 6 motors, Raspberry Pi, Teensy, and hall effect sensor.
Paper
Picture

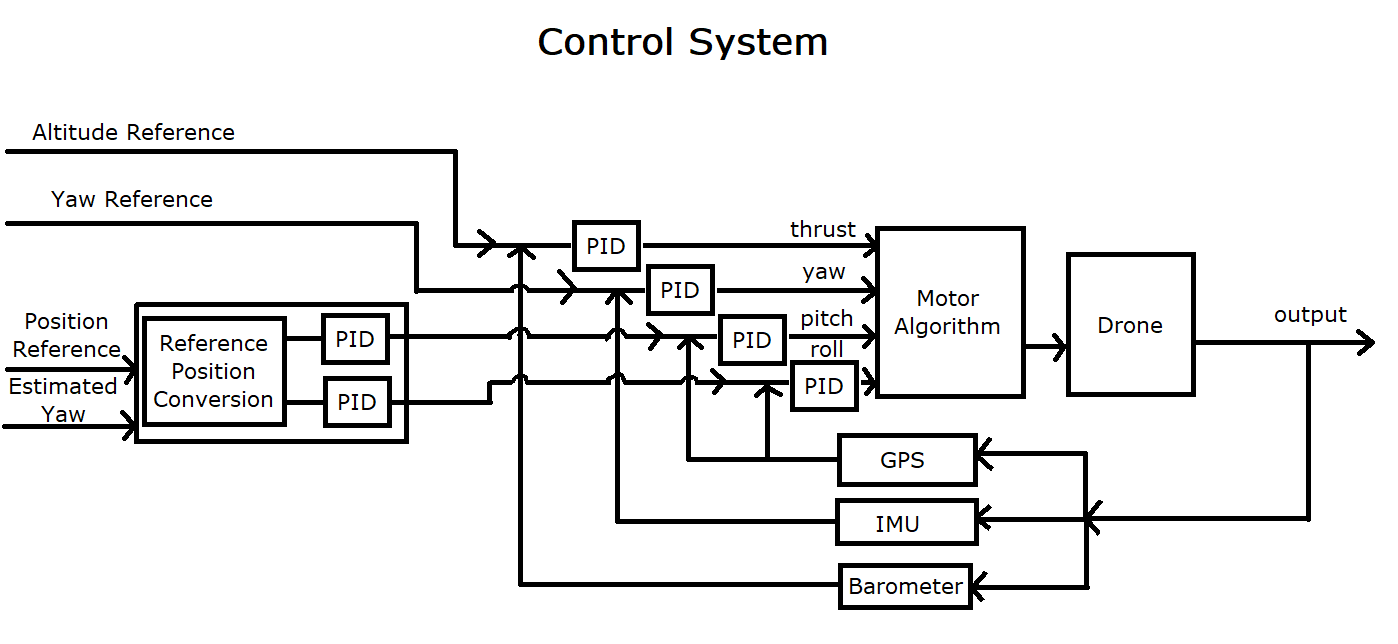
Drone Flight Controller Simulation
Simulated a DJI Mavic 3 Drone using Webots Simulator. Received sensor output from barometer, imu, and gps.
Controlled pose with PID filter for roll, pitch, yaw, and xyz position
Controller
Simulation

Partially Observable Failure Recovery
Created a behavior tree to speed up failure recovery for industrial robot manipulation and
utilized the Intel RealSense camera and the UR5e robot in the Webots environment.
Applied a Particle Filter for state estimation and POMDP for decision making.
Paper
Video1
Video2
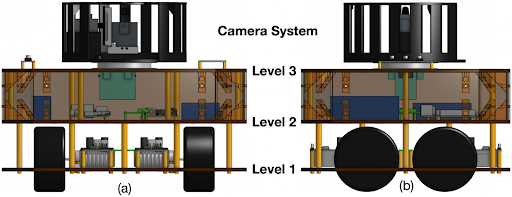
Autonomous Soccer Car Robot
Designed and manufactured a car capable of playing soccer with SolidWorks, 3D printing, laser cutting, and fasterners.
Received absolute coordinates from a camera and path planned using an A* algorithm.
Paper
Movement Video
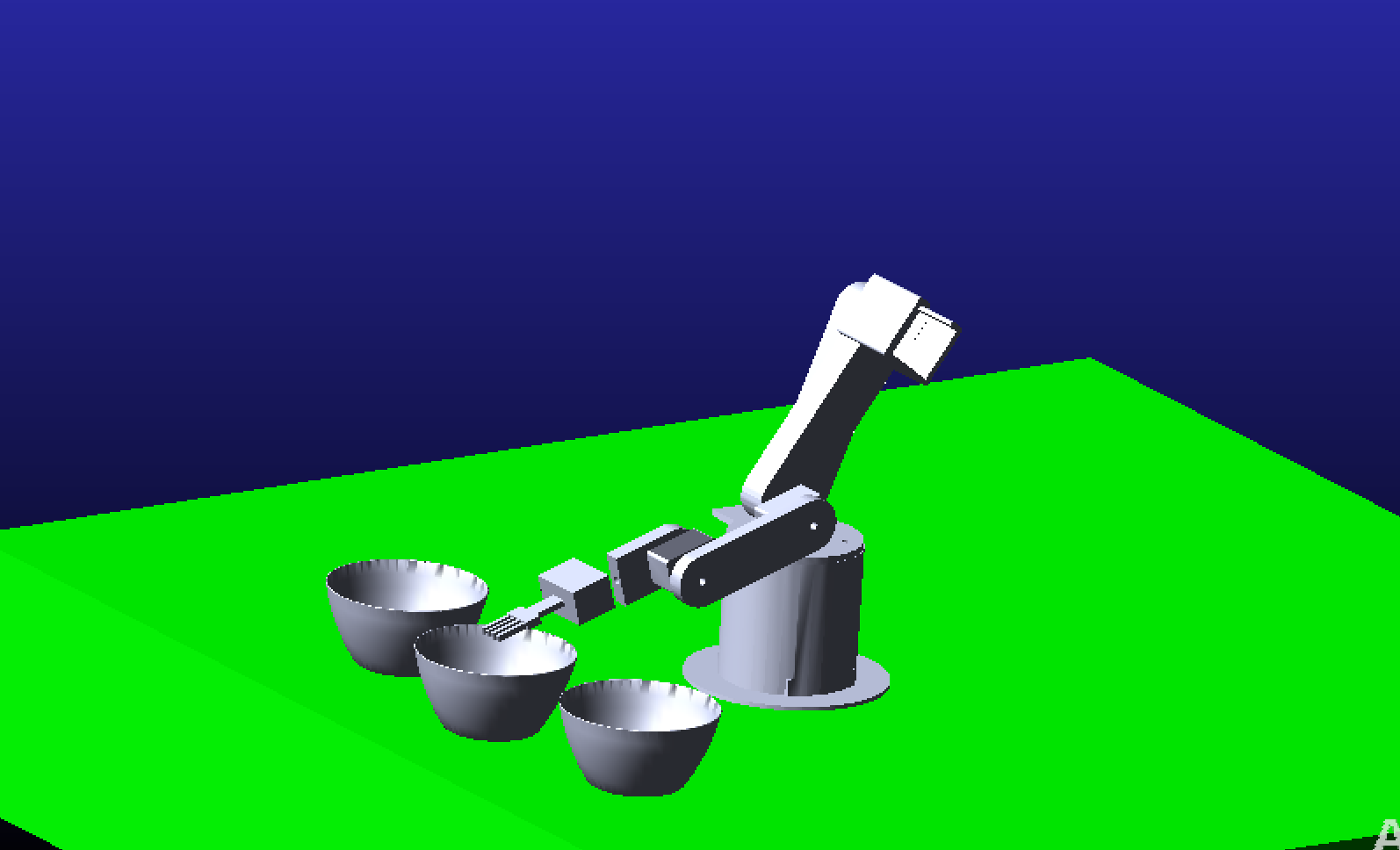
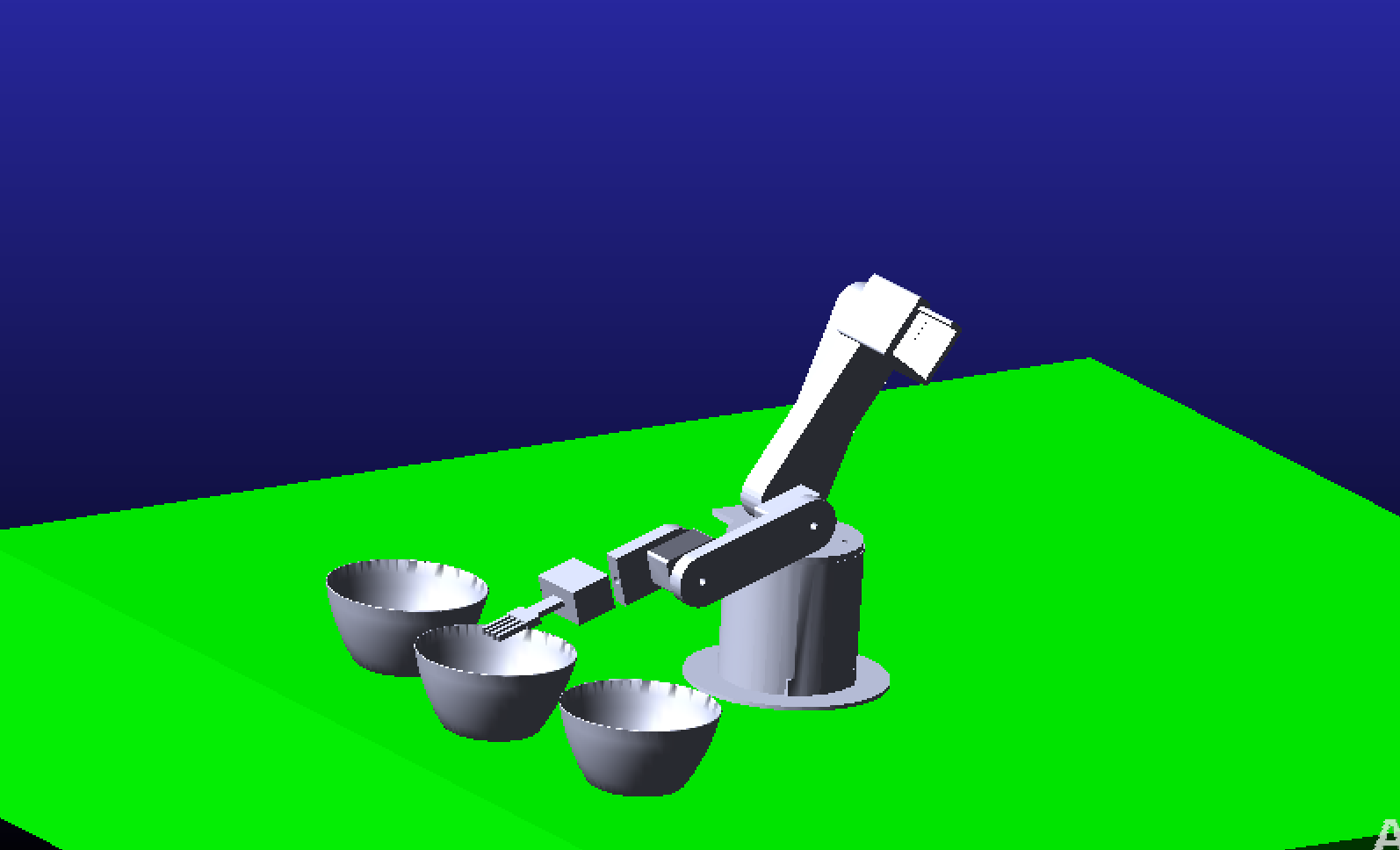
Automated Feeder
Designed and simulated a robotic arm capable of feeding someone at a table using SolidWorks and ADAMS software.
Calculated angles needed at joints for the wanted position of the end effector using forward and inverse kinematics.
Video
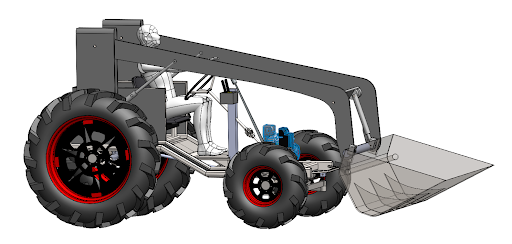
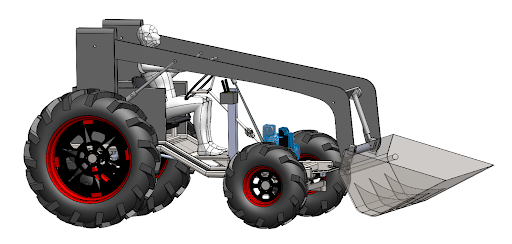
Excavator
Designed and 3D modeled an excavator capable of moving heavy loads of dirt. The goal was to move 5000 lbs of
dirt over .5 miles in 30 mins with a $12,000 budget. Designed hydraulics, steering, drive system, and chassis.
Powerpoint
Hydraulic
Steering

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}